Occlusion-Aware Contingency Safety-Critical Planning for Autonomous Vehicles
Real-time safe trajectory planning for autonomous vehicles in occluded environments is achieved through a contingency planner that combines reachability analysis with consensus ADMM optimization, validating improved safety and efficiency in dynamic intersections.
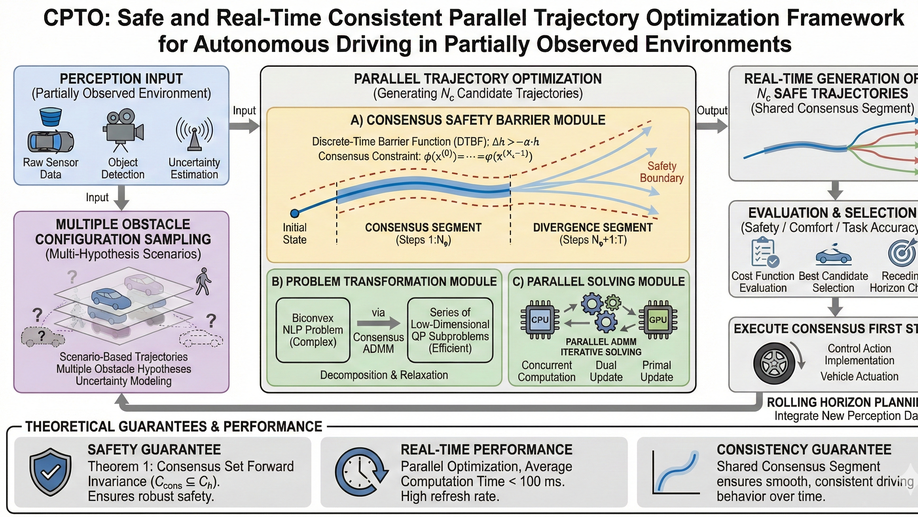
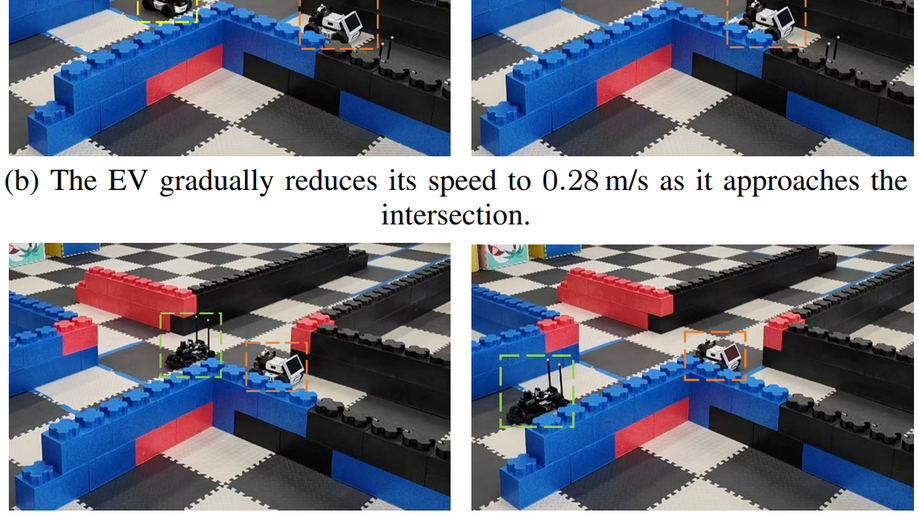
Safe and Real-Time Consistent Planning for Autonomous Vehicles in Partially Observed Environments via Parallel Consensus Optimization
This framework introduces a consensus spatiotemporal safety barrier within a scenario tree structure to address potential hazards. Using consensus ADMM and a shared spatiotemporal safety barrier for each trajectory, the framework evaluates diverse risk configurations while enforcing motion consistency under perception uncertainty, such as sensor mis-detections. The framework is particularly effective in environments with dense obstacles in partially observable environments, enabling scalability to handle an increasing number of obstacles in large-scale, real-time optimization. We present the limitations of current parallel trajectory planning approaches, particularly their low accuracy and poor real-time performance.
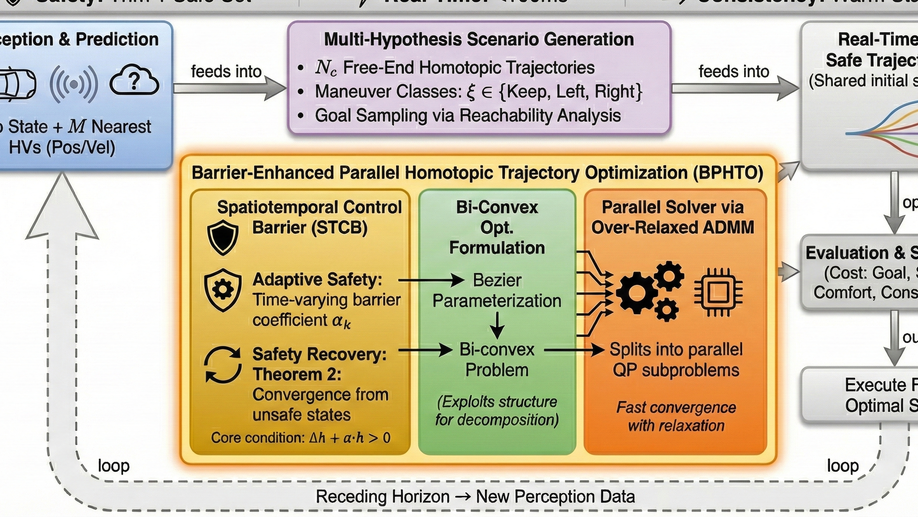
Barrier-Enhanced Parallel Homotopic Trajectory Optimization for Safety-Critical Autonomous Driving
This research seamlessly integrates discrete decision-making maneuvers with continuous trajectory variables for safety-critical autonomous driving. The algorithm operates in real-time, optimizing trajectories of autonomous vehicles to ensure safety, stability, and proactive interaction with uncertain human-driven vehicles across various driving tasks, utilizing over-relaxed ADMM iterations. We provide a comprehensive theoretical analysis of safety and computational efficiency.
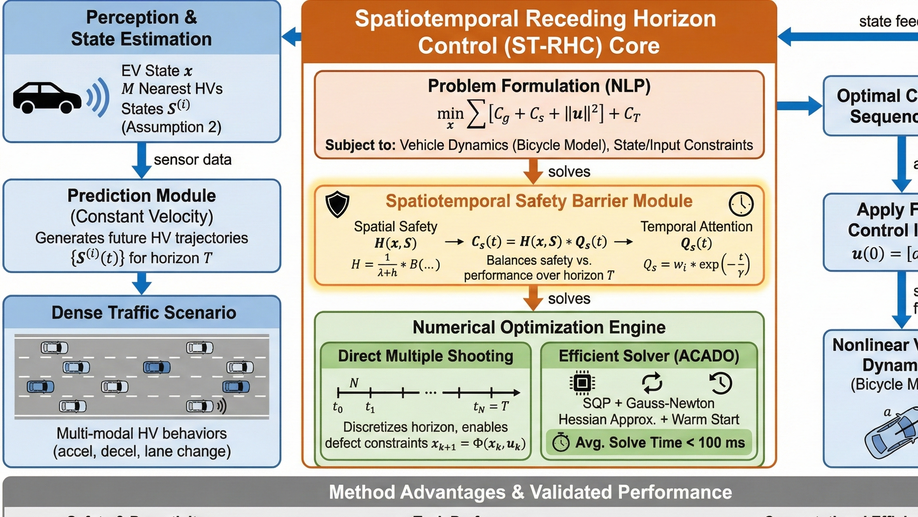
Spatiotemporal Receding Horizon Control with Proactive Interaction Towards Autonomous Driving in Dense Traffic
This research proposes a computationally-efficient spatiotemporal receding horizon control (ST-RHC) scheme to generate a safe, dynamically feasible, energy-efficient trajectory in control space, where different driving tasks in dense traffic can be achieved with high accuracy and safety in real time. The effectiveness of the proposed ST-RHC scheme is demonstrated through comprehensive comparisons with state-of-the-art algorithms on synthetic and real-world traffic datasets under dense traffic.
Real-Time Parallel Trajectory Optimization with Spatiotemporal Safety Constraints for Autonomous Driving in Congested Traffic
Present an integrated decision and trajectory planning approach for the autonomous vehicles to achieve high travel efficiency in dynamic and congested environments.

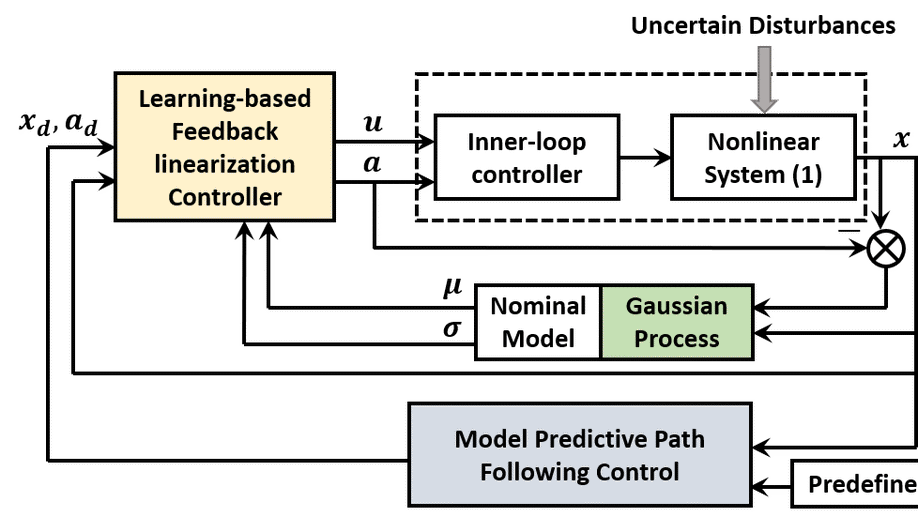
Safe Learning-Based Feedback Linearization Tracking Control for Nonlinear System with Event-Triggered Model Update
We propose a learning-based tracking control scheme based on a feedback linearization controller in which uncertain disturbances are approximated online using Gaussian Processes. Using the predicted distribution of disturbances given by GPs, a Control Lyapunov Function and Control Barrier Function based Quadratic Program is applied, with which probabilistic stability and safety are guaranteed.
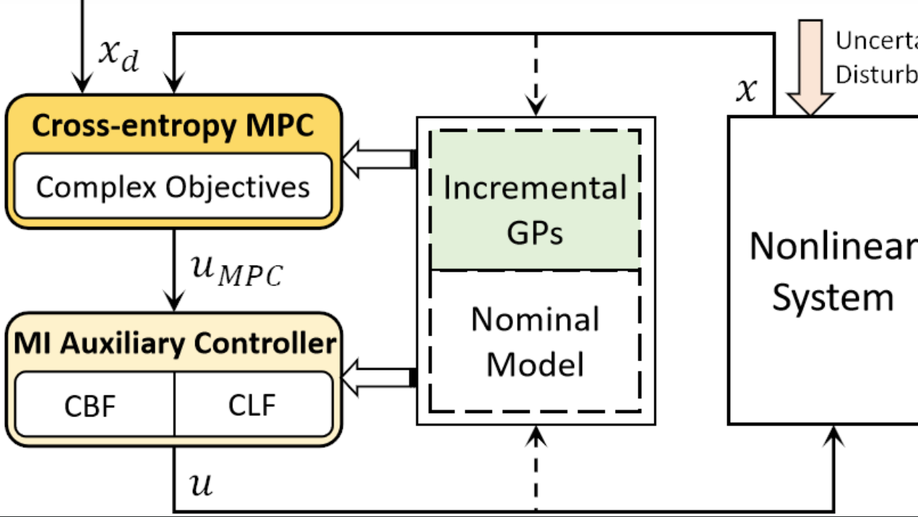
Safe learning-based gradient-free model predictive control based on cross-entropy method
A safe and learning-based control framework for model predictive control is proposed to optimize nonlinear systems with a non-differentiable objective function under uncertain environmental disturbances. The control framework integrates a learning-based MPC with an auxiliary controller in a way of minimal intervention. The proposed approach provides a promising solution to the propagation of stochastic state distributions in MPC, allowing for improved task performance while ensuring high levels of safety.
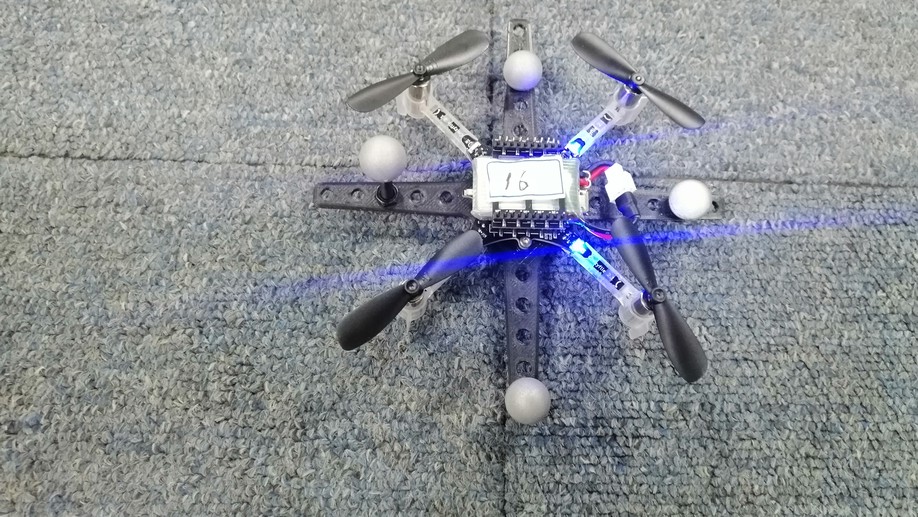
Safe learning-based tracking control for quadrotors under wind disturbances
Enforcing safety on precise trajectory tracking is critical for aerial robotics subject to wind disturbances. In this paper, we present a learning-based safety-preserving cascaded quadratic programming control for safe trajectory tracking under wind disturbances.
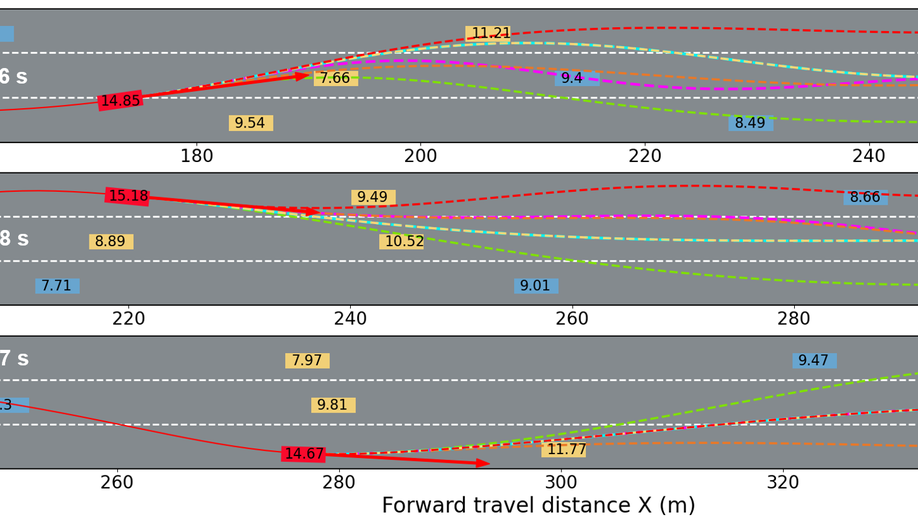
Learning-Based Predictive Path Following Control for Nonlinear Systems Under Uncertain Disturbances
A learning-based MPFC control paradigm for nonlinear systems under uncertain disturbances, coupling a high-level model predictive path following controller for proactivity with a low-level learning-based feedback linearization controller for adaptivity. Following that, nonlinear systems can rapidly rejoin their reference trajectory after sudden wind disturbances with stability guarantees.
Learning-Based Safety-Stability-Driven Control for Safety-Critical Systems under Model Uncertainties
A learning-based safety-stability-driven control algorithm is presented to guarantee the safety and tracking stability for nonlinear safety-critical systems subject to control input constraints under model uncertainties.